本文是赛迪功能安全系列报道的第三篇,前两篇文章主要介绍了功能安全基本概念和标准中对于机器人产品功能安全的具体要求。本文将着重介绍ISO 13849标准在机器人领域的应用,帮助读者理解机器人标准的功能安全的实践路径。
ISO 13849系列标准源自EN 954-1《机械安全:控制系统有关安全的部件》,并吸收功能安全标准IEC 61508系列的部分概念和思想衍生而来,是安全控制系统在机械产品中的最佳工程实践。国标GB/T 16855系列标准等同采用ISO 13849,详见下表。
表1:机械领域功能安全标准对照表
序号 |
国内标准号 |
等同采用的国际标准号 |
标准名称 |
1 |
GB/T 16855.1-2018 |
ISO 13849-1: 2015 |
《机械安全 控制系统有关安全部件第1部分:设计通则》 |
2 |
GB/T 16855.2-2015 |
ISO 13849-2: 2012 |
机械安全 控制系统安全相关部件 第2部分:确认 |
1、适用对象
采用液压、气动技术的对象;
对机械零组件及相关设备的要求;
电气∕电子∕可编程电子安全相关系统。
2、核心指标
本标准将控制系统安全相关部件在预期条件下执行安全功能的能力称之为性能等级PL(Performance Level),分为a、b、c、d和e五个离散等级。这些性能等级由每小时发生危险失效的概率来定义,即PFHD,见表2。
表2:性能等级对应的每小时危险失效率范围
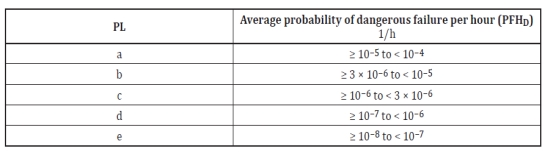
安全功能危险失效的概率取决于如下因素,包括:
1)、类别(Cat.):硬件部分使用的安全架构,通过结构设计、故障检测和部件的可靠性来达到;
2)、诊断覆盖率(DC):故障检测机制的范围,通过对通道中的元件施加不同措施的检测手段以尽可能达到在下一次要求安全功能时故障被检测到;
3)、平均危险失效间隔时间(MTTFD):组件或系统在发生故障前的平均寿命,其值受使用环境、频率和强度等因素的影响;
4)、共因失效(CCF):对于共因故障的保护-设计的可靠性;
5)、其他:设计流程、运行负荷、环境条件和操作程序等。
其中使用类别(Cat.)、诊断覆盖率(DC)和平均危险失效间隔时间(MTTFD)的关系如图1所示。
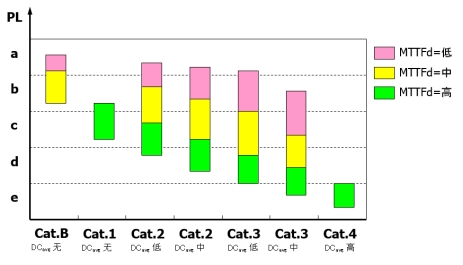
图1 ISO 13849-1中类别、MTTFD、DC和PL等级
通过以上参数和因素,可以分析并计算出安全功能实际的危险失效率和对应的性能等级,如果此性能等级大于所需的性能等级(PLr),即PL≥PLr,则证明此安全功能的安全回路设计是符合要求。反之需要重新修改设计,包括更改软硬件结构,更换安全零部件,增加通道的诊断覆盖率等,直至满足PL≥PLr。
序号 |
产品类别 |
相关标准 |
功能安全要求 |
1 |
工业机器人 |
GB 11291.1 ISO 10281-1 |
原则上所有安全相关控制系统应满足类别3,PL=d要求,除非风险评估结果确定替代的性能准则 |
2 |
工业机器人集成系统 |
GB 11291.2 ISO 10281-2 |
原则上所有安全相关控制系统应满足类别3,PL=d要求,除非风险评估结果确定替代的性能准则 |
3 |
物流机器人 |
ISO 3691-4 |
详见表4 |
4 |
个人助理型服务机器人 |
GB/T 36530 ISO 13482 |
详见表5 |
表4:物流机器人功能安全要求
安全功能 |
安全功能说明 |
所需最低PL |
制动系统 |
制动系统控制 |
d |
驻车制动系统控制 |
b |
速度控制 |
超速检测(速度大于机器人额定速度) |
c |
在速度小于0.3m/s时的速度监控 |
c |
ESPE线性运动时,为适应尺寸安全检测范围的修正(例如前进方向,后退方向,横向方向和偏航方向) |
d |
ESPE根据转向和旋转方向修正安全检测区域 在相关行驶方向无速度限制 |
d |
ESPE根据尺寸修正安全检测区域 用于转向和旋转方向的附加侧面区域,且机器人相关方向(x和/或y)速度限制在0.7m/s(侧面速度) |
c |
稳定性,见条款14 |
/ |
电池充电系统 |
充电连接的失效 |
b |
负载处理 |
检查负载是否在预定位置 |
b |
负载处理装置的位置和运动 |
b |
和条款14稳定性相关 |
/ |
转向 |
和条款14稳定性相关 |
/ |
稳定性 |
避免速度、转向和负载处理造成的不稳定 |
c |
紧急停止 |
停止机器人所有危险运动和功能 |
d |
人员检测系统 |
在行驶方向上检测到人员后停止机器人运动 |
d |
检测到人员后在不足够的间隙处停止机器人运动 |
d |
在手动或维保模式下关闭人员检测系统 |
d |
抑制人员检测系统 |
d |
在负载末端停止机器人(例:存储区) |
d |
根据条件选择人员检测系统的保护区域 |
d |
根据条件选择人员检测系统的保护区域,用于附加的转向和旋转方向侧面检测,且机器人相关方向(x和/或y)速度限制在0.7m/s(侧面速度) |
c |
操作模式 |
检测到乘客位于机器人指定的驾乘位置 |
d |
“保持-运转”功能(非自动模式) |
c |
机器人设计为无操作者和驾驶者的自动模式,但保留了操作者位置,当操作者存在时,应关闭所有自动功能 |
c |
手动模式 |
/ |
自动模式下的舵柄位置 |
c |
报警系统 |
光、声音信号/系统 |
a |
表5:个人助理机器人功能安全要求

赛迪机器人检测认证中心作为中国机器人CR认证服务的权威机构,将持续推进机器人相关标准的制定工作,关注产品质量和安全问题,促进产业的标准化和规模化,为机器人产业的安全保驾护航。
