上一篇文章介绍了ISO13849的适用对象、核心指标,以及常用标准对于机器人性能等级PL的规定。本文继续解读类别(Cat.)、平均危险失效间隔时间(MTTFD)、平均诊断覆盖率(DCavg)、共因失效(CCF)等核心指标的具体要求。
(一)控制系统安全相关部件的类别(Cat.)
控制系统安全相关部件的类别指定架构共5种,从低到高分别是B类、1类、2类、3类和4类。B类、1类、2类为单一通道,3类和4类则应有物理上的冗余结构或者冗余方法保证单一故障不会导致安全功能的失效,每类指定架构详见图2-图4。

图2 类别B和类别1的指定架构
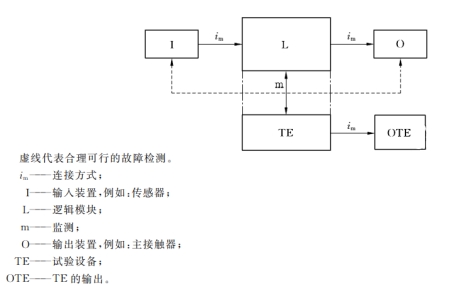
图3 类别2的指定架构

图4 类别3和类别4的指定架构
所有类别均应满足基本安全原则,除B类外的其他四类架构在满足基本安全原则基础上还应满足经验证的安全原则,1类架构所使用的元件额外需满足经验证的元件的要求。每种架构可能的平均危险失效间隔时间(MTTFD),通道的平均诊断覆盖率(DCavg),共因失效(CCF)见表6,相关参数的计算详见3.3-3.5节。
其中的基本安全原则、经验证的安全原则和经验证的元件的详细要求在ISO 13849-2中作为验证和确认架构满足与否的信息给出。
表6 类别要求摘要
类别 |
要求摘要 |
系统性能 |
用于实现安全的原则 |
每个通道的MTTFd |
DCavg |
CCF |
B |
SRP/CS和(或)其保护装置以及它们的元件都应根据相关标准进行设计、构造、选择、装配和组合,以使其能承受预期的影响。应使用基本安全原则 |
故障的发生能导致安全功能的丧失 |
主要特征是元件的选择 |
低至中 |
无 |
无关 |
1 |
应采用B类的要求。应使用经验证的元件和经验证的安全原则 |
故障的发生能导致安全功能的损失,但发生的概率低于B类的概率 |
主要特征是元件的选择 |
高 |
无 |
无关 |
2 |
应采用B类的要求和经验证的安全原则 应通过机器控制系统以适当的时间间隔检查安全功能 |
在两次检查之间发生故障能导致安全功能的丧失通过检查来检测安全功能的丧失 |
主要以结构为特征 |
低至高 |
低至中 |
见2.5 |
3 |
应采用B类的要求和经验证的安全原则 有关安全部件的设计应使: —在这些部件中的任何一个部件的单一故障都不会导致安全功能的损失,以及 —只要合理可行,都可检测到单一故障 |
当发生单一故障时,安全功能总是有效 某些但不是全部故障将被检测到 未检测到故障的积累能导致安全功能的丧失 |
主要以结构为特征 |
低至高 |
低至中 |
见2.5 |
4 |
应采用B类的要求和经验证的安全原则 有关安全部件的设计应使: —在这些部件中的任何一个部件的单一故障都不会导致安全功能的损失,以及 —在下一个有关安全功能指令发出时或发出前检测到单一故障。如果不可能,则未检测到的故障的积累不应导致安全功能的损失 |
发生单一故障时,安全功能总是有效 故障积累的检测减小了安全功能损失的概率(高DC) 故障将被及时检测到,以防安全功能的丧失 |
主要以结构为特征 |
高 |
高(包括故障累积) |
见2.5 |
(二)通道平均危险失效间隔时间(MTTFD)
通道平均危险失效间隔时间(MTTFD)分为高中低三档,详见表7。
表7 每个通道的平均危险失效时间(MTTFD)
每个通道的指标 |
每个通道的范围 |
低 |
3年≤MTTFD<10年 |
中 |
10年≤MTTFD<30年 |
高 |
30年≤MTTFD<100年 |
(三)通道平均诊断覆盖率(DCavg)
通道平均诊断覆盖率(DCavg)分为高中低和无四档,详见表8。
表8 诊断覆盖率(DC)
指标 |
范围 |
无 |
DC<60% |
低 |
60≤DC<90% |
中 |
90≤DC<99% |
高 |
DC≥99% |
注1:对于由几个部件组成的SRP/CS,采用了DC的平均值DCavg。 |
(四)共因失效(CCF)
共因失效通过表9列出的措施进行打分,ISO 13849系列标准在吸纳功能安全基础标准IEC 61508系列的时候做了简化,本系列标准共因失效仅有满足要求和不满足要求两种,即如果打分结果大于65,则认为采取了防止共因失效的措施。
表9 防止CCF的措施的打分和量化过程
序号 |
防止CCF的措施 |
1 |
分离/隔离 |
信号路径之间的物理分离: 以配线管路方式分离; 印刷电路板上足够的间隙和爬电老化距离。 |
2 |
差异性 |
采用不同的技术/设计或物理原则,例如: 第一个通道为可编程电子的,第二个通道为硬布线的; 启动的种类; 压力和温度。 距离和压力的测量: 数字的或模拟的; 不同方法制造的元件。 |
3 |
设计/应用/经验 |
3.1 |
过电压、过压力、过电流等的保护 |
3.2 |
所用的元件是经验证的 |
4 |
评价/分析 |
为了避免CCF,设计中是否考虑了失效模式和影响分析的结果 |
5 |
能力/培训 |
设计者/维护者是否已经过培训,使其了解CCF的原因和结果 |
6 |
环境 |
6.1 |
根据适当的标准,通过防止污染和电磁兼容(EMC)来防止CCF。 流体系统:传压介质的过滤、入口处污垢的防止、受压气体的排泄,例如:依照元件制造商关于传压介质净化的要求。 电气系统:是否检查了系统的电磁抗扰性,例如:按照相关标准中防止CCF的规定。 对于流体和电气组合的系统,这两个方面都宜予以考虑。 |
6.2 |
其他影响: 是否已考虑了对所有的环境因素,例如温度、冲击、振动、湿度等(例如:相关标准中所规定的)的抗扰性的要求? |
赛迪机器人作为中国机器人CR认证服务的权威机构,将持续推进机器人相关标准的制定工作,关注产品质量和安全问题,促进产业的标准化和规模化,为机器人产业的安全保驾护航。
